Hotline: 0912390695







Нейронная Система Управления Снижением Транспортного Вертолета С Грузом В Сложных Погодных Условиях
Mua hàng : 0982435558
Giao hàng toàn quốc
Thanh toán bằng hình thức chuyển khoản trước
Phí ship có thể phát sinh theo cân nặng hàng hóa
98
Mã ISBN: 978-604-67-2898-6
Mã ISBN Điện tử:
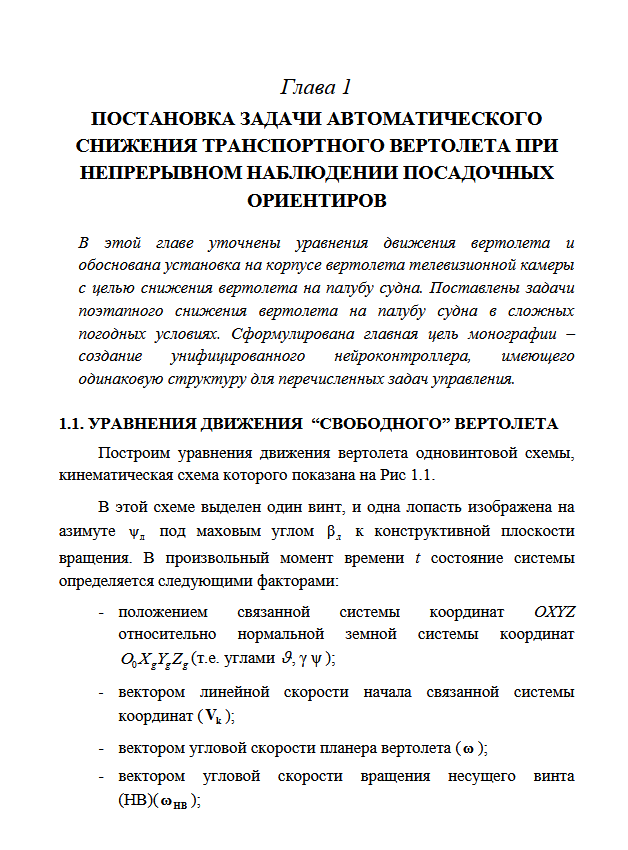
В настоящее время объем посадочных работ вертолета
непрерывно увеличивается (см. Рис 1). Кроме этого, осуществление
наблюдения с воздуха наземных объектов является одной из наиболее
эффективных форм использования в народном хозяйстве
малоразмерной авиации. Снижение вертолета на палубу судна – один
их самых сложных и зрелищных видов авиационных работ, где можно
увидеть, как гигантский кран за считанные минуты десантирует груз
или “живых людей” на палубу судна в сложных погодных условиях.
Однако, эти работы являются не только сложными, но и
опасными. Предугадать все, что может произойти при их выполнении
8
невозможно, но можно максимально снизить степень Риска. По
мнению экспертов [1], существенную роль в уменьшении степени
Риска играет человеческий фактор. Работы, выполняемые на большой
высоте или в сложных погодных условиях, требуют от летчика особого
внимания при управлении, что создает дополнительные
психофизиологические нагрузки, кардинально отличающиеся от
нагрузок, переносимых им в обычном полете. Можно заметно
разгрузить летчика и освободить его от функций автостабилизатора
углового положения вертолета с помощью дифференциальное
включение автопилота в основную проводку управления. Однако, в
целом, как показывает практика, управление вертолетом снижения
остается сложным процессом. Существующие бортовые системы
автоматического управления снижением вертолета на палубу судна
пока еще не в полной мере отвечают необходимому для этого вида
работ уровню точности. Поэтому их применение для этой цели без
совершенствования системы управления не может считаться
эффективным.
Из вышесказанного следует, что разработка технического
средства, позволяющего автоматически решать задачи снижения
вертолета, обнаружения и распознавания посадочного места с
помощью установленных на борту телевизионных камер и
десантирования груза на палубу судна, является весьма актуальной
задаче
Bình luận
SÁCH NỔI BẬT
Xem toàn bộ